2022.45.15 verzió
Megjelent 2023. április 8.
Kiadási térkép
Jelenlegi globális telepítés
Elosztási arány
Flotta szintű bevezetés napra lebontva
Kiadási megjegyzések
FSD Beta v11.3.6
A 2022.45.15 tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
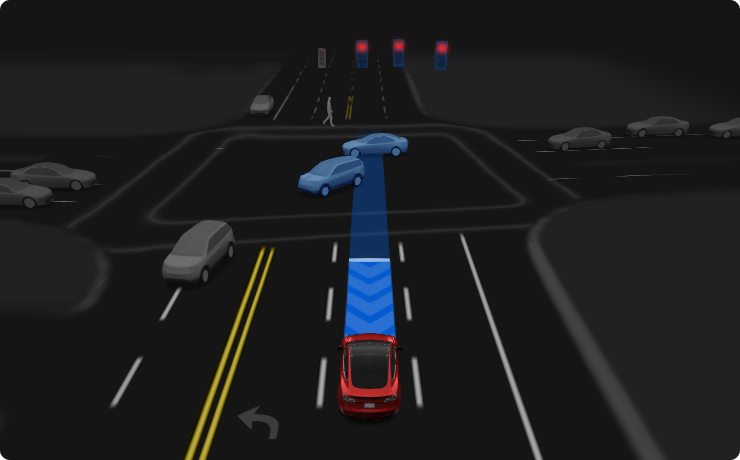
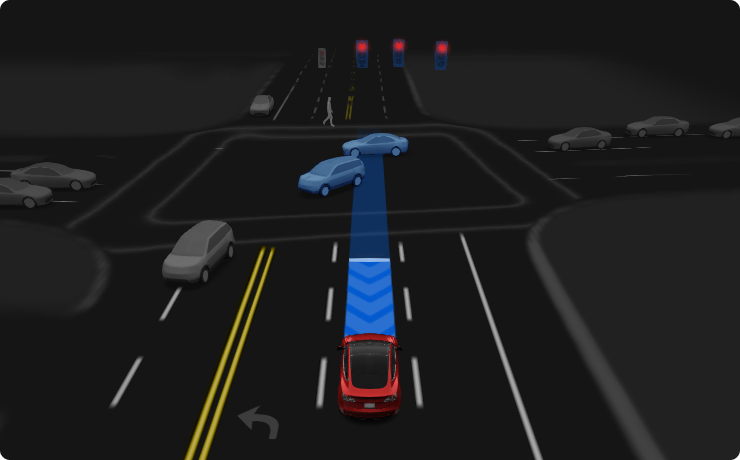
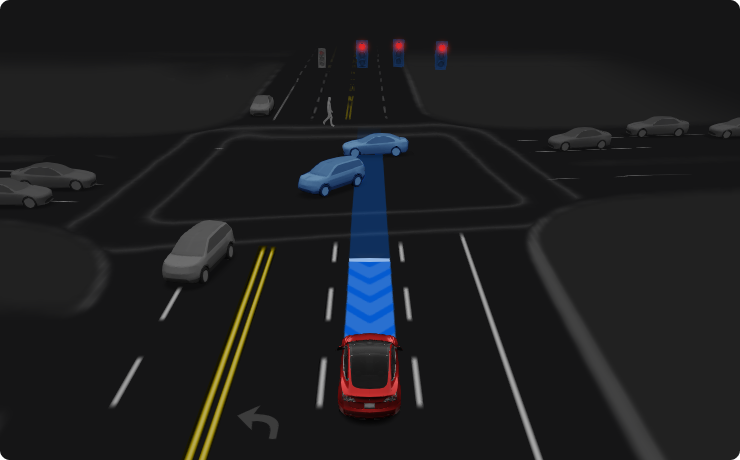
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
- Az automatikus holttérkamera pozíciójának beállítása, amikor az FSD Beta aktív, hogy a robotpilóta vizualizációja prioritást kapjon. Húzza a kamerát az egyéni pozíciók mentéséhez.
Over-the-Air (OTA) visszahívás
A 2022.45.15 tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.
FSD Beta v11.3.5
A 2022.45.14. tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
- Az automatikus holttérkamera pozíciójának beállítása, amikor az FSD Beta aktív, hogy a robotpilóta vizualizációja prioritást kapjon. Húzza a kamerát az egyéni pozíciók mentéséhez.
Over-the-Air (OTA) visszahívás
A 2022.45.14. tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.
FSD Beta v11.3.4
A 2022.45.13 tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
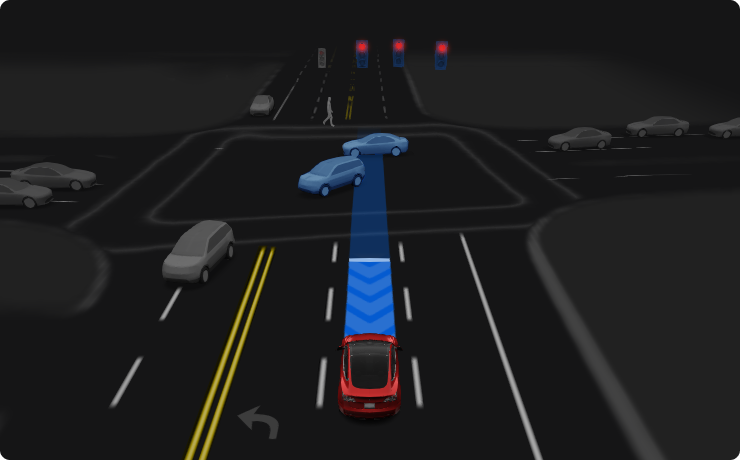
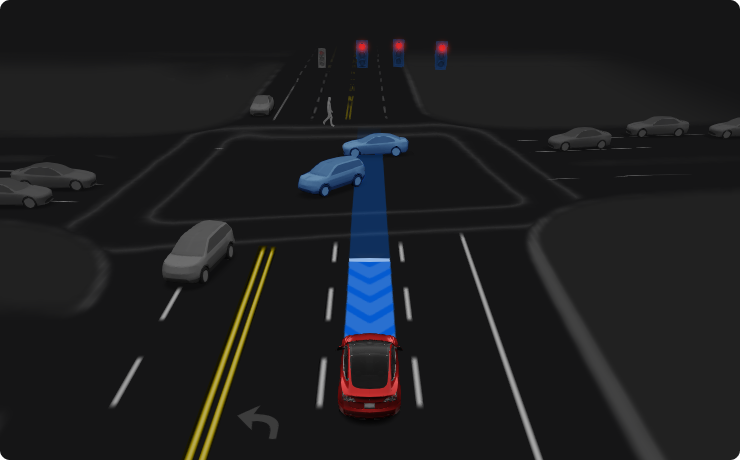
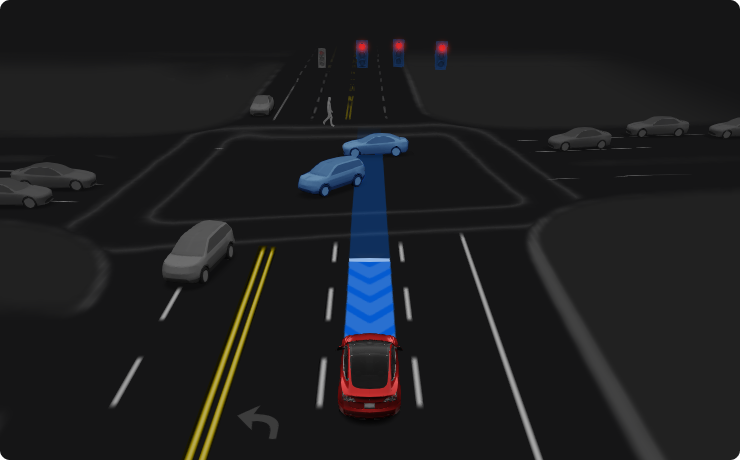
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
- Az automatikus holttérkamera pozíciójának beállítása, amikor az FSD Beta aktív, hogy a robotpilóta vizualizációja prioritást kapjon. Húzza a kamerát az egyéni pozíciók mentéséhez.
Over-the-Air (OTA) visszahívás
A 2022.45.13 tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.
FSD Beta v11.3.3
A 2022.45.12. tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
- Az automatikus holttérkamera pozíciójának beállítása, amikor az FSD Beta aktív, hogy a robotpilóta vizualizációja prioritást kapjon. Húzza a kamerát az egyéni pozíciók mentéséhez.
Over-the-Air (OTA) visszahívás
A 2022.45.12. tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.
FSD Beta v11.3.2
A 2022.45.11. tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
- Az automatikus holttérkamera pozíciójának beállítása, amikor az FSD Beta aktív, hogy a robotpilóta vizualizációja prioritást kapjon. Húzza a kamerát az egyéni pozíciók mentéséhez.
Over-the-Air (OTA) visszahívás
A 2022.45.11. tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.
FSD Beta v11.3.1
A 2022.45.10 tételben szerepel
- Engedélyezett FSD Beta az autópályán. Ez egységesíti a látás- és tervezési stacket autópályán és autópályán kívül, és felváltja a több mint négyéves, elavult autópálya stacket. A régi autópálya stack még mindig több egykamerás és egykockás hálózatra támaszkodik, és egyszerű sáv-specifikus manőverek kezelésére volt beállítva. Az FSD Beta többkamerás videohálózatai és a következő generációs tervező, amely lehetővé teszi az összetettebb ügynöki interakciókat, kevésbé támaszkodva a sávokra, utat nyitnak az intelligensebb viselkedések, a simább irányítás és a jobb döntéshozatal hozzáadásához.
- A flottából származó további 30 000 automatikus címkézett klipnek köszönhetően 15%-kal javult a közeli bevágási esetek visszahívása, különösen a nagy teherautók és a nagy nyomatékú forgatókönyvek esetében. Ezen túlmenően kibővített és hangolt dedikált sebességszabályozás a becsapódó objektumokhoz.
- Javította az ego helyzetét széles sávokban, a közelgő kanyar irányába való elhajlással, hogy a többi autónak lehetősége legyen az ego körül manőverezni.
- Javított kezelhetőség a nagy ívű vagy nagy teherautókkal kapcsolatos forgatókönyvek során a sávban való eltolással, hogy megőrizze a biztonságos távolságot az úton lévő többi járműtől és növelje a kényelmet.
- Javított viselkedés sűrű forgalomban történő sávváltások esetén. Az Ego mostantól nagyobb előnyt tart az elzárt sávokban, hogy sűrű forgalomban fedezze az esetleges rések kialakulását.
- Javított sávváltások sűrű forgalomban, mivel nagyobb gyorsulást tesz lehetővé az igazodási fázisban. Ez természetesebb hézagválasztást eredményez a szomszédos sávban haladó járművek nagyon közeli előzéséhez.
- A sávok, vonalak és az útszélek előrejelzésének javításával simábbá tette a kanyarodásokat. Ezt a sávvezetési modul legújabb verziójának az útszélek és vonalak hálózatába történő integrálásával értük el.
- Nagyobb pontosság más járművek mozgó szemantikájának észlelésében. 23%-kal javult a pontosság azokban az esetekben, amikor más járművek vezetésre váltanak át, és 12%-kal csökkent a hiba azokban az esetekben, amikor az Autopilot tévesen parkolva érzékeli a vezető járművet. Ezeket a hálózatban a videókontextus növelésével, az ilyen forgatókönyvek több adatának hozzáadásával és az irányítás szempontjából releváns járművek veszteségbüntetésének növelésével sikerült elérni.
- Meghosszabbított maximális pályaoptimalizálási horizont, ami simább vezérlést eredményez nagy görbületű utak és távolabb lévő járművek esetén, amikor autópálya sebességgel haladunk.
- Javított vezetési magatartás a parkoló autók sora mellett a keskeny sávokban, inkább az eltolás és a sávban maradás ahelyett, hogy szükségtelenül sávot váltana vagy lelassítana.
- Javított sávváltási manőverek a látásalapú lokalizáció és a durva térképes sávszámlálás jobb fúziója révén.
- Szöveges megjegyzéseket adtunk hozzá a felhasználói felülethez, hogy közöljük az FSD Beta által tervezett közelgő manővereket. Javított a jármű útvonalán közelgő lassulások megjelenítésén is. Az ékzárak különböző átlátszatlansággal és sebességgel jelzik a lassulás intenzitását, és egy folytonos vonal jelenik meg azokon a helyeken, ahol az autó meg fog állni.
- Javította az objektumfelismerés visszahívását és pontosságát, nevezetesen 10%-kal csökkentette a félteherautók pozícióhibáját, 3%-kal, illetve 7%-kal növelte a 100 m-nél távolabb áthaladó járművek visszahívását és pontosságát, és 5%-kal növelte a motorkerékpárok visszahívását. Ezt úgy értük el, hogy további minőségi ellenőrzéseket hajtottunk végre a kétmillió videoklipből álló, automatikus címkézésű adathalmazunkban.
- A széles sávokban és kereszteződések közelében lévő objektumok körüli hamis eltolódások csökkentése az objektumok kinematikai modellezésének javításával alacsony sebességű forgatókönyvek esetén.
Over-the-Air (OTA) visszahívás
A 2022.45.10 tételben szerepel
Egy nemrégiben történt visszahívásnak megfelelően (az USA-ban a 23V085-ös, Kanadában a 2023-063-as kampány) a Tesla az FSD Beta rendszerben a következő konkrét viselkedésformákat javítja:
1. Javítottuk a döntési logikát, hogy bizonyos sárga lámpáknál továbbhaladjunk vagy megálljunk, a döntést egy olyan kompromisszumos keretként modellezve, amely figyelembe veszi a becsléseket: a megálláshoz szükséges lassulás, a kereszteződésbe való be- és kilépés ideje, valamint a kereszteződésben a lámpa pirosra váltása előtt megtett távolság. Ezáltal a sárga lámpák kezelése természetesebbé és emberközelibbé válik.
2. Javítottuk a hosszirányú lassítás ellenőrzési profilját a stoptáblás kereszteződésekhez való felvezetéskor, hogy a teljes manővert érzékelhetőbbnek és természetesebbnek érezzük.
3. Javította a Tesla sebességbeállítását bizonyos sebességzónákba való belépéskor, lehetővé téve az észlelt sebességkorlátozó táblák korábbi ellenőrzését. Az észlelt sebességkorlátozó táblákra való lassításkor a reakció magabiztosságát az aktuális sebesség és annak az észlelt tábla által jelzett sebességtől való különbsége határozza meg. A felhasználói felületen a sebességkorlátozás ikonja mögé vizuálisan világító jelzés került, amely figyelmezteti a vezetőt, ha a jármű beállított sebessége több mint 50%-kal meghaladja az észlelt sebességkorlátozást. Végül, az FSD Beta rendszerben megszűnt az abszolút sebességhatár eltolás lehetősége; csak a százalékos alapú eltolás lesz elérhető.
4. Frissítettük a viselkedést bizonyos forgatókönyvek esetében, amikor a Tesla manőverezhet a kanyarodósávból, hogy egyenesen haladjon tovább. Ezeket a manővereket mostantól sávváltásként kezeljük, ahol a kanyarkijelzőt arra használjuk, hogy a többi járművezetőt figyelmeztessük a Tesla szándékára.
Emlékeztetőül: a járművezető felelős a jármű üzemeltetéséért még akkor is, ha az FSD Beta be van kapcsolva. Folyamatosan felügyelnie kell az utat, kezét a kormányon kell tartania, és készen kell állnia arra, hogy beavatkozzon a biztonság fenntartása érdekében.